When imaging fast-moving objects, it is a challenge to capture an image with a sufficient signal level while maintaining minimal motion blur or image smear. Designed to solve this issue, Time-Delay Integration (TDI) is a specialized readout mode optimized to image fast-moving objects with increased sensitivity compared to traditional snapshot imaging.
While TDI CCDs have existed since the 1970s, Nüvü Camēras’ is the first manufacturer to integrate this technology to the EMCCD, which features significantly lower noise and faster readout rates.
TDI allows capturing images of moving objects at very high speeds or in low light levels. In typical CCDs, charges are accumulated on the sensor during exposure and the whole frame is transferred and read out at once to make the image available. However, if the object moves during exposure, the signal is spread out over multiple pixels which creates blurring. Even in cameras adapted for scanning applications, such as line-scan CCDs, this means exposure time must be short to preserve image quality. As such, a line-scan CCD needs high light levels to be able to capture sufficient signal for a high-quality image quickly enough to avoid blurring.
TDI overcomes the limitation on illumination levels by shifting the image on the sensor as it is being integrated, to follow the movement of the target. On CCDs, signal charges on each line of the sensor are transferred vertically to the readout area. TDI synchronizes this transfer with the movement of the object; this mitigates blurring since signal charges on the sensor follow the target object. As a result, the effective exposure time of the target lasts as long it is in the field of view of the camera. The more vertical lines the CCD sensor has, the longer the effective integration.
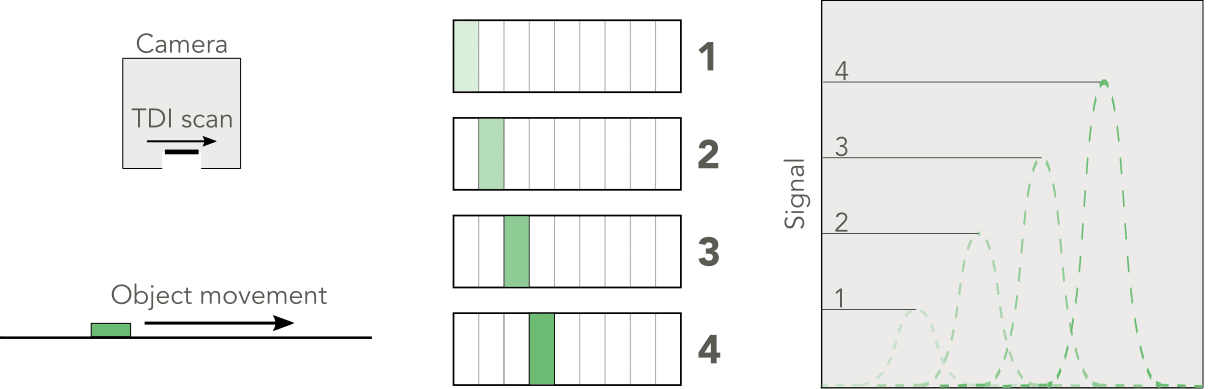
For the TDI technique to be successfully implemented, the signal charges must be transferred in the same direction and at the same relative speed as those of the object to be imaged. This is often handled by the use of external triggering for the camera synchronized with the movement of the object.
Due to the synchronized transfer of lines across the whole sensor, in TDI mode the time-base of the imaging is referenced to the line rate rather than to the frame rate. Hence, the exposure time is set as the exposure time per line, and the external trigger input controls the read-out of single lines of the ribbon. In essence, the image output by a TDI camera has a fixed horizontal size but an unlimited vertical size. The effective exposure time for the image is equal to the number of vertical pixel lines of the CCD times the exposure time per line. It’s also relevant to note that there is no downtime between frames in TDI mode.
Commercially available TDI cameras are usually standard CCD cameras. The EMCCDs share a detector architecture very similar to CCDs to which is added a special electron multiplication output register. The EMCCD is designed to virtually eliminate the detrimental effect of the readout noise intrinsic to imaging devices, making them significantly more sensitive and able to support higher readout rates. See more information on this subject here.
EMCCD cameras with a TDI readout is an unprecedented combination that enables the use of EM gain (and photon-counting) at the same time as TDI’s increased effective exposure time for moving objects. Moving objects with extremely faint light emissions can thus be observed more clearly and at greater speeds.
Nüvü™ integrates its patented electronics to both CCD & EMCCD cameras, allowing users to either take advantage of its exceptional noise control through the large form-factor of specialized TDI CCD sensors or the unmatched sensitivity of EMCCDs.